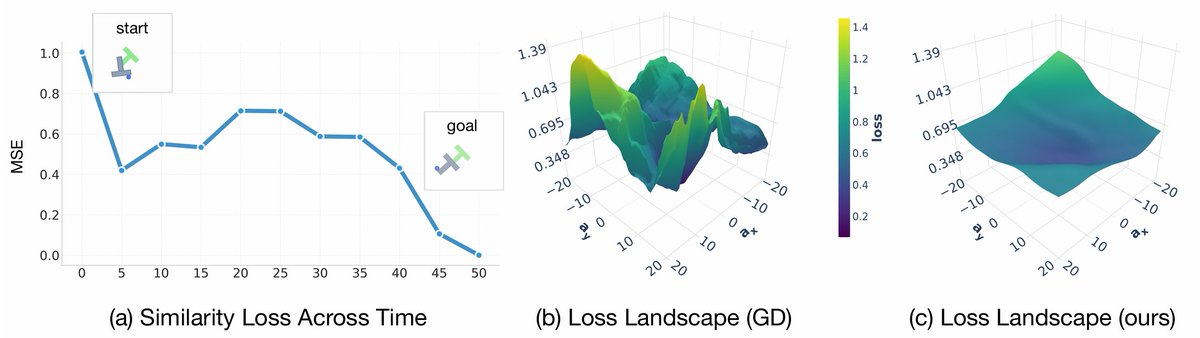
Code for our new world model planner is live! github.com/michael-psenka/gr… Includes our implementation on dino-wm, as well as implementations on jepa-wm and le-wm, and minimal pseudocode for anyone to re-implement themselves. Michael Psenka (@michaelpsenka) tl;dr New planner for world models! GRASP: gradient-based, stochastic, parallelized. Long range planning for world models has always been an issue. 0th order methods like CEM/MPPI dominate, but have degrading performance at longer contexts or higher-dimensional actions. We wanted to address this from the ground up. w/ Michael Rabbat, @ask1729 , @ylecun*, @_amirbar* (equally advised) — https://nitter.net/michaelpsenka/status/2019870377032503595#m
→ View original post on X — @berkeley_ai, 2026-03-30 20:44 UTC